抓取体验行业领先
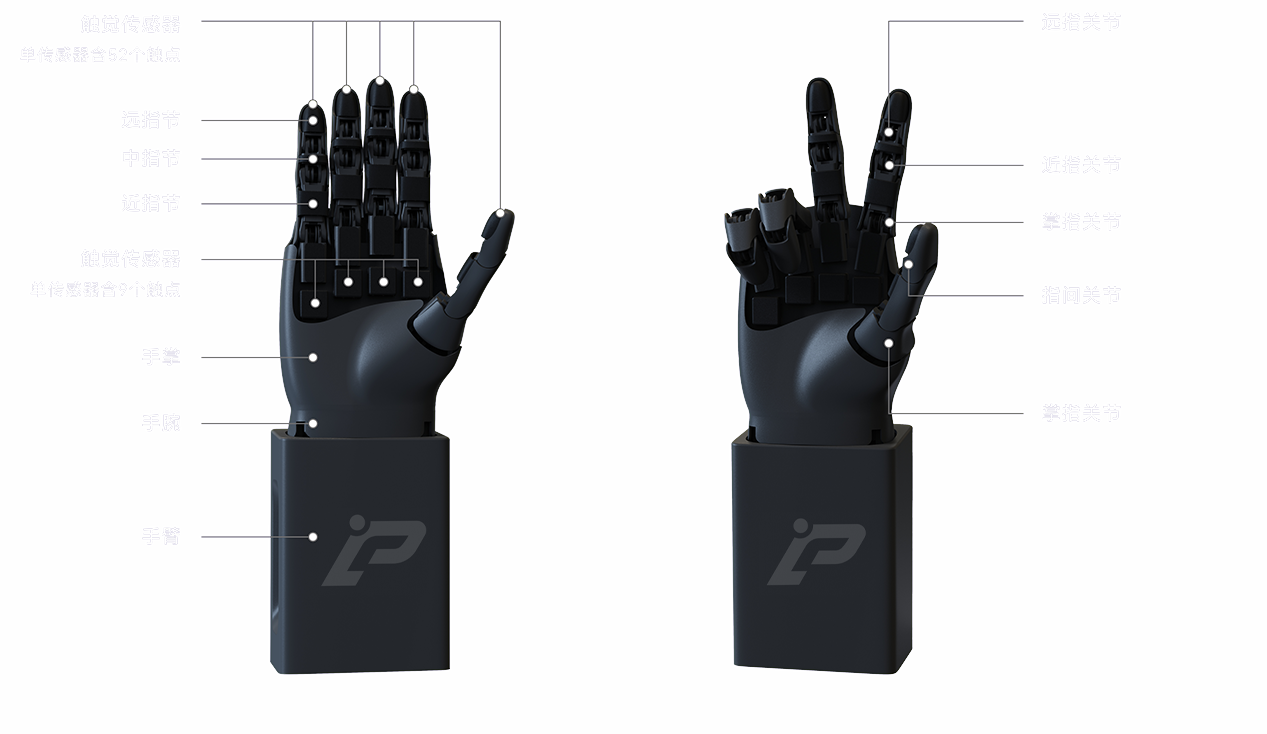
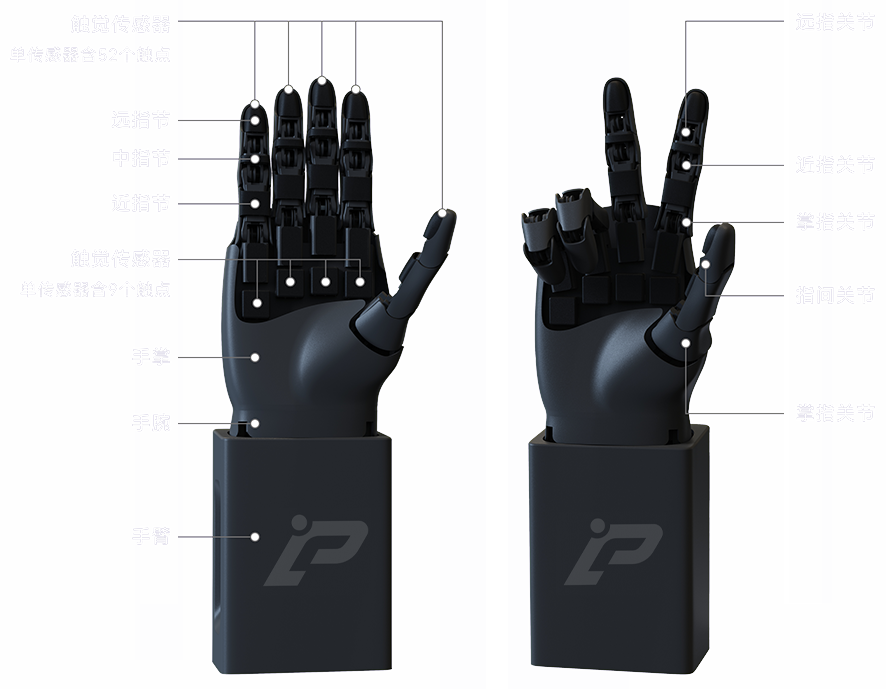
依托自研腱绳 - 连杆混合传动,实现 “接近人手的灵活抓取 +
工业级精准控制”,兼顾柔顺手感与高精度,填补传统末端执行器在复杂操作中的能力空白。
行业内率先采用腱绳+连杆混合传动,兼具柔性操作与精密控制。同时,通过自研ProxiGrasp 智能抓取算法,充分释放硬件潜力,是一款具备多场景落地能力的应用级产品,能够自主适应复杂任务需求,在工业自动化、精密医疗、极端环境作业及高逼真度虚拟现实交互等领域实现精准操作。















扫码关注